摘 要:扩展阿斯特罗姆(Astrom, Karl Johan)的继电反馈法在温控器中的应用,把最初仅辨识PID控制3参数(比例系数、积分和微分时间常数)增加到包括温控系统中最大升温与降温率、平均维持功率和控制周期在内的7参数(依次表示为KP、Ti、Td、TR_RM、TD_RM、AMPow和Tp);用“温变速率法”快速辨识热负载扰动大小并用动态变参PID控制及时抑制扰动;依据温控系统的热容量大小变化把温控的全过程划分在4种状态,区别处理。结果是STC温控器在热负载扰动下的控制性能大大提升,可与国外知名品牌RKC媲美。
本文引用地址:https://www.eepw.com.cn/article/202205/434588.htm关键词:数字PID温控器;扰动抑制;扩展的继电反馈法;温变速率法;动态变参PID控制;程序算法与流程
在温控器业界,对PID 三参数的辨识也称为整定。
1 温度的PID控制
以纸管干燥机为例,烘房是控制对象;湿的纸管是物料,也可称为热负载,它通过传送带从烘房的一端进,在烘干后从另一端出。以下把热控制系统或温控系统简称为TCS(thermal control system)。
为进行有区别的适应性控制,以热容量为度量可以把温控的全过程划分在4 种状态:空热负载状态(以下简称空载),此时烘房内无纸管(物料);增加热负载状态(简称加载),此时烘房内从无物料到物料逐渐增多;稳定的热负载状态,此时烘房内的物料量相对稳定;移除热负载状态(简称移载),此时烘房内物料逐渐移出直到空载。后3 种属于热负载变化状态(简称变载)。TCS 的空载状态下的温控是变载状态下温控的基础。
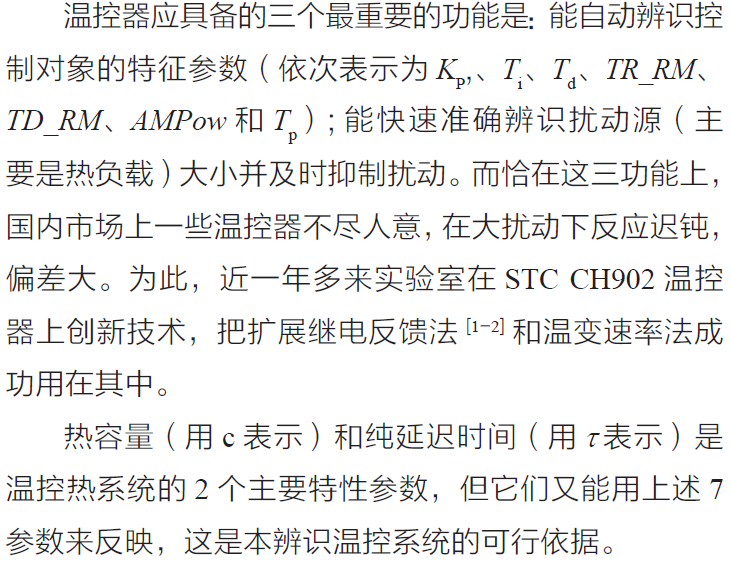
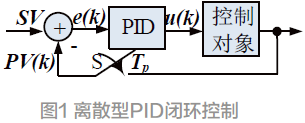
数字离散型PID 闭环控制如图1 所示。
数字PID 温控器一般的温控流程如图2 所示。
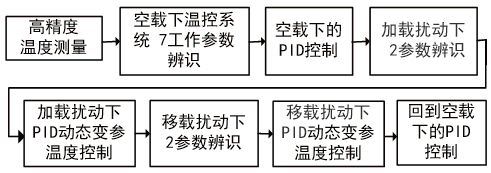
图2 数字PID温控器控温工作流程
相关高精度温度测量的内容详见参考文献[8]。
2 参数辨识
辨识包括2 个方面,一是针对在空载状态下TCS的上述7个固有热特征参数;二是针对在变载状态下的扰动源的2个特征性参数。这其中涉及的3个参数要重点说明。
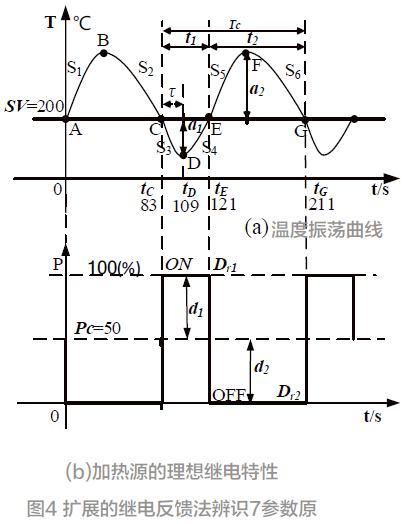
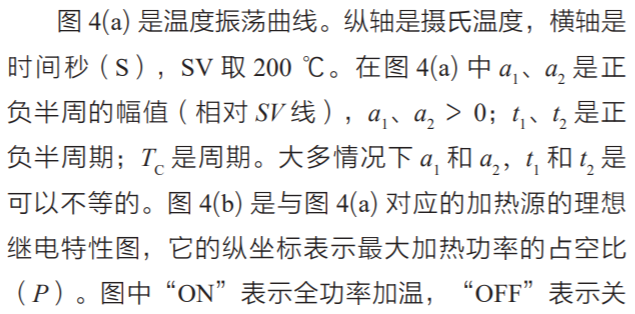
3) 平均维持功率(AMPow):它只是空载时的辨识参数,是指图4(a) 中在SV点附近在一个振荡周期TC内的平均加热功率。这个辨识量对于减少TCS在受扰动下的调节时间和超调量很有用。在PID控制开始时AMPow应作为Dr的初始功率输出值。

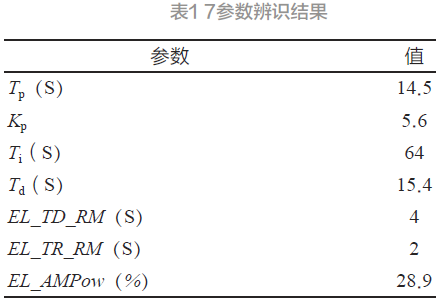
2.1 辨识TCS的7个特性参数
2.1.1 理论基础
7 参数辨识的理论依据是继电反馈法,详见[1-2]。而继电反馈法又是在Z-N(齐格勒- 尼科尔斯)法则[3]上发展起来的。
注意2 点:


2.1.2 理论实现
图3 温控对象-10公斤的铁块
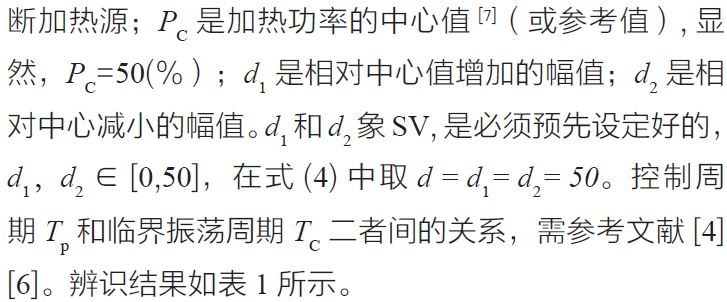
扩展的继电反馈法原理如图4 所示。
3 程序算法与流程
温控器用MCU 是STM32F103,程序开发工具是IAR,语言为C。
3.1 7个TCS特性参数辨识程序
1) 基本要求
如图4(a) 所示, 把整个辨识过程分成6个阶段(S1~S2),以极值点或交点(温度曲线与SV线)作为这些阶段分界点(A 点到G 点);
2)算法
①确认设定值SV( 如200 ℃ );
②全功率升温至SV;
③如果PV≥SV,则停止加热(令Dr = 0), 进入辨识的阶段1(S1),同时启动定时器(t=tA=0 秒),tA是在A 点的时间;
④在S1,要用判断一阶后向差分的符号变化的方法求温度的极大点(B 点)。此点后进入S2;
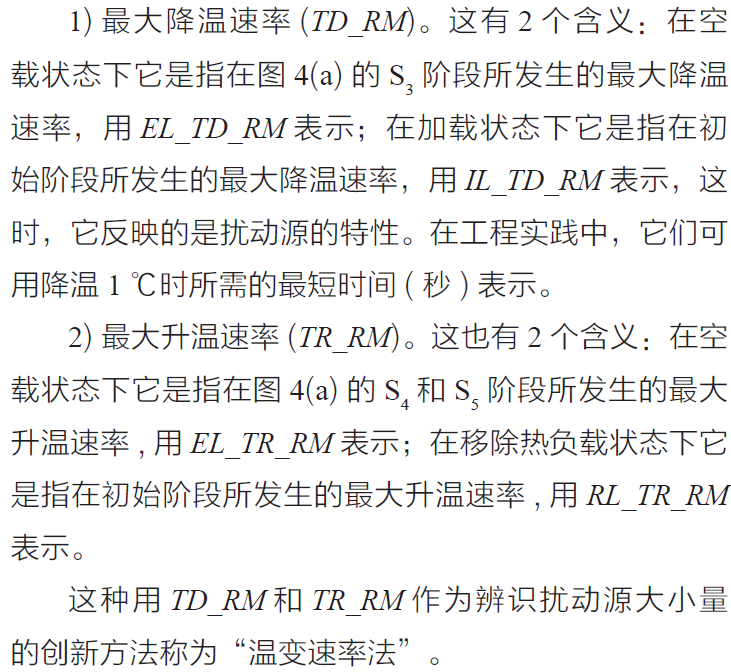
⑤从S2开始,记录降温的过程值,以便计算最大降温速率EL_TD_RM;
⑥在S2,如果PV≤SV,则又开始全功率加热(令Dr = 100)升温, 记录tC 并进入S2;
⑦在S3,要开始为计算AMPow 采集数据(Dr 及其持续的时间)直到辨识结束;类似④,要求极小值TD,在D 点后进入S4;
⑧从S4开始(有些TCS 可能会延长到S5),记录升温的过程值,以便计算最大升温速率EL_TR_RM;
⑨在S4,如果PV ≥ SV,则又停止加热, 记录tE 并进入S5;
⑩在S5,类似④,要求TF,F 点后进入S6;
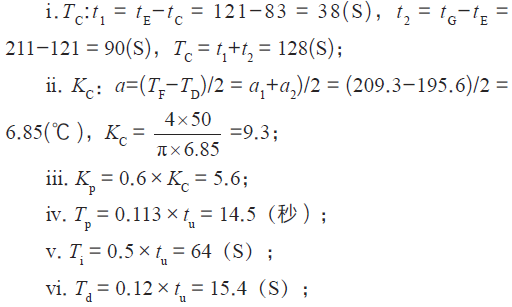
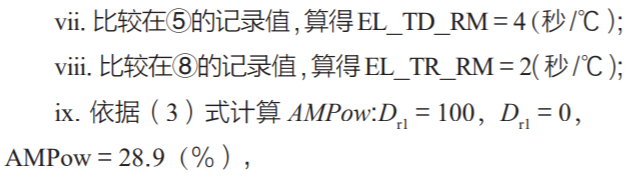
⑪在S6,如果PV≤SV,记录tG 并进入下列辨识参数计算:
⑫结束阶段及整个辨识过程。
3.2 扰动源的2个特性参数辨识程序
总体要求有3 个:迅速、准确和稳定可靠,要防止误识别。
1)主要思想
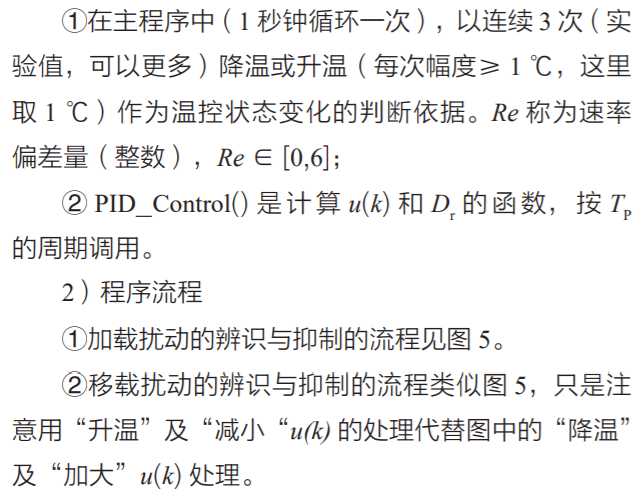

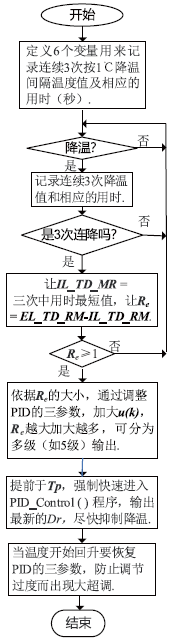
图5 温变速率法程序流程
4 对比测试及数据分析
图6 所示是STC CH902( 左边那一个) 与RKCCH402(日本产知名品牌)二个温控器正在做辨识和抑制热负载扰动性能的对比测试,SV = 200 ℃,以电扇风冷作为加载及移载扰动源。

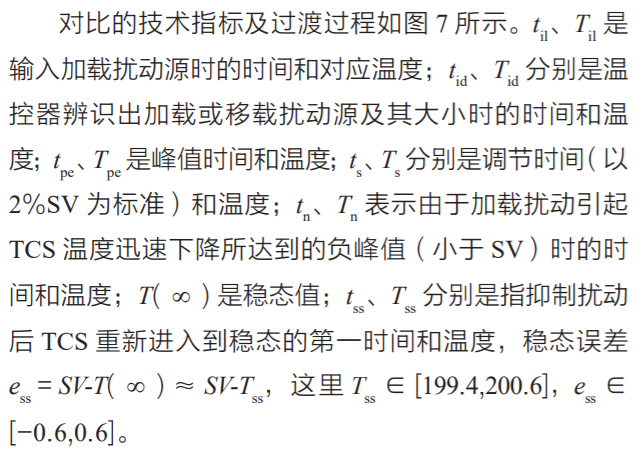
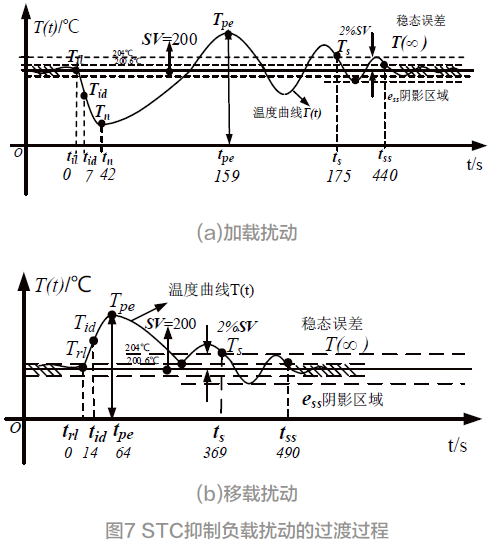
注意几点:
①图中时间t 的单位是秒(s),温度T 的单位是℃;
②负峰值只在稳态时间前出现才有效,有时可能没有,如图7(b) 所示;
③做加载扰动时把til的时间设为0 点,其它时间指标是相对此点而言;类似,在移载扰动时把trl 的时间设为0 点,如图7 所示。
表2 中各项技术指标值即是对应的时间和温度。
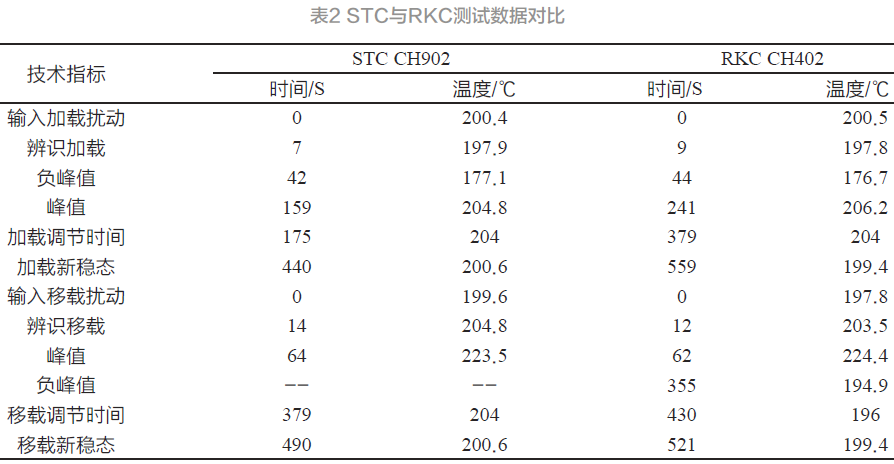
表中“--”表示无负峰值出现。
在表2 中能看到STC CH902 和RKC CH402 在辨识热负载方面有相近的性能(看指标的第2、3 及8、9 项),且二者都达到200±0.6 ℃的稳态误差。但在抑制负载扰动方面STC 更有效,不仅峰值更低和负峰值更高,而且调节时间及进入新的高精度稳态的时间要更短(看指标的第4~6,10~12 项)。
5 结论
表2 的数据表明扩展的继电反馈法和温变速率法的结合应用能有效提升温控器在辨识和抑制扰动方面的控制性能。例如,在强风冷却扰动下最大偏差(降温时)、超调量及调节时间比之前分别减少9 ℃、3 ℃和6 分钟,稳态误差则同RKC。
参考文献:
[1] ASTRÖM K J,HÄGGLUND Automatic tuning of simple regulators with specifications on phase and amplitude margins
[J],Automatica,1984,20(5):645-651.
[2] ASTRÖM K J.Adaptation,auto-tuning and smart controls[M/OL]//Technical Reports TFRT-7340,Department of Automatic Control,Lund Institute of Technology,1987:430-431.https:// lup.lub.lu.se/record/8602272.
[3] ZIEGLER J G,NICHOLS N B.,Optimum setting for automatic controllers,trans[J].ASME,1942,64:759-768.
[4] 潘新民.微型计算机控制技术[M].2版.北京:人民邮电出版社,1988:220-239.
[5] 苏绍兴.基于变速积分PID的温度控制系统的设计[J].机电工程,2002,19(6):28.
[6] BUCZ Š,KOZÁKOVÁ A.PID controller design for specified performance[M].Slovak Republic,2012.
[7] 殷华文.温度控制继电反馈参数自整定技术研究[J].自动化仪表,2016.37(3):23-26.
[8] 王昌世.数字温控器高精度测温设计[J].电子产品世界,2021,28(8):60-66,73.



